Ejemplo de cálculo de la matriz Jacobiana.
Introducción:
En esta entrada vamos a realizar un ejemplo de cálculo de la matriz Jacobiana por tres métodos diferentes: Analítico, geométrico y el convencional y usando los resultados de la entrada anterior: Relación entre la Jacobiana analítica y geométrica podremos encontrar las equivalencia entre ellos.
Definición del problema:
Calcule la matriz Jacobiana del robot de la Fig. 1 el cual tiene los siguientes parámetros D-H:

Fig. 1. Robot del Ejercicio.
Articulación
|
θ
|
d
|
a
|
α
|
1
|
q1
|
l1
|
0
|
90º
|
2
|
q2
|
0
|
0
|
-90º
|
3
|
0
|
q3
|
0
|
0
|
Tabla 1. Parámetros D-H del robot del ejercicio en la Fig. 1.
A partir de los parámetros D-H encontramos la matriz T de transformación homogénea del robot:
1. Solución analítica:

La función atan2(Y, X) calcula el arcotantegente de cuatro cuadrantes tan-1 de Y y X.
A partir de los valores de la posición y la orientación encontrados anteriormente, calculamos la matriz Jacobiana según su definición analítica:

2. Solución geométrica:



Tenemos que:

Convirtiendo la Javobiana analítica a la geométrica:
De la entrada anterior llamada Relación entre la Jacobiana analítica y geométrica, sabemos que:
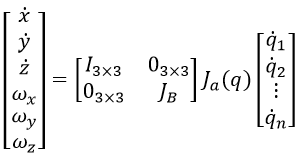
Siendo JB:


En nuestro caso, para el robot del problema:
 Por lo tanto:
Por lo tanto:




3. Solución convencional:
A partir de la tabla de parámetros D-H obtenemos:
 De aquí calculamos:
De aquí calculamos:
 De las matrices 0Ai-1 tenemos que (0A0 es la matriz identidad):
De las matrices 0Ai-1 tenemos que (0A0 es la matriz identidad):

Los vectores de posición i-1pn son:

Ya que las articulaciones 1 y 2 son rotativas y la articulación 3 es prismática:
 Siendo:
Siendo:
 Por lo tanto:
Por lo tanto:
 Concatenando la J1| J2| J3 finalmente obtenemos la matriz Jacobiana convencional (igual a la geométrica):
Concatenando la J1| J2| J3 finalmente obtenemos la matriz Jacobiana convencional (igual a la geométrica):

A partir de la matriz Jacobiana posteriormente podremos determinar las singularidades del robot, analizar la redundancia, determinar la cinemática inversa de velocidades, relacionar las fuerzas en el actuador final con los torques o pares aplicados en las juntas o articulaciones y esta matriz se aplica en el modelo dinámico del robot y de allí la importancia de poderla calcular.



Los vectores de posición i-1pn son:

Ya que las articulaciones 1 y 2 son rotativas y la articulación 3 es prismática:




Conclusiones:
Se ha calculado la matriz Jacobiana por tres métodos distintos y se ha encontrado que son equivalentes entre sí. De las respuestas se puede observar que la Jacobiana es dependiente de la configuración del robot.A partir de la matriz Jacobiana posteriormente podremos determinar las singularidades del robot, analizar la redundancia, determinar la cinemática inversa de velocidades, relacionar las fuerzas en el actuador final con los torques o pares aplicados en las juntas o articulaciones y esta matriz se aplica en el modelo dinámico del robot y de allí la importancia de poderla calcular.
No hay comentarios:
Publicar un comentario